Boston University
ME 740: Vision, Robotics, and Planning
PhD. John Baillieul
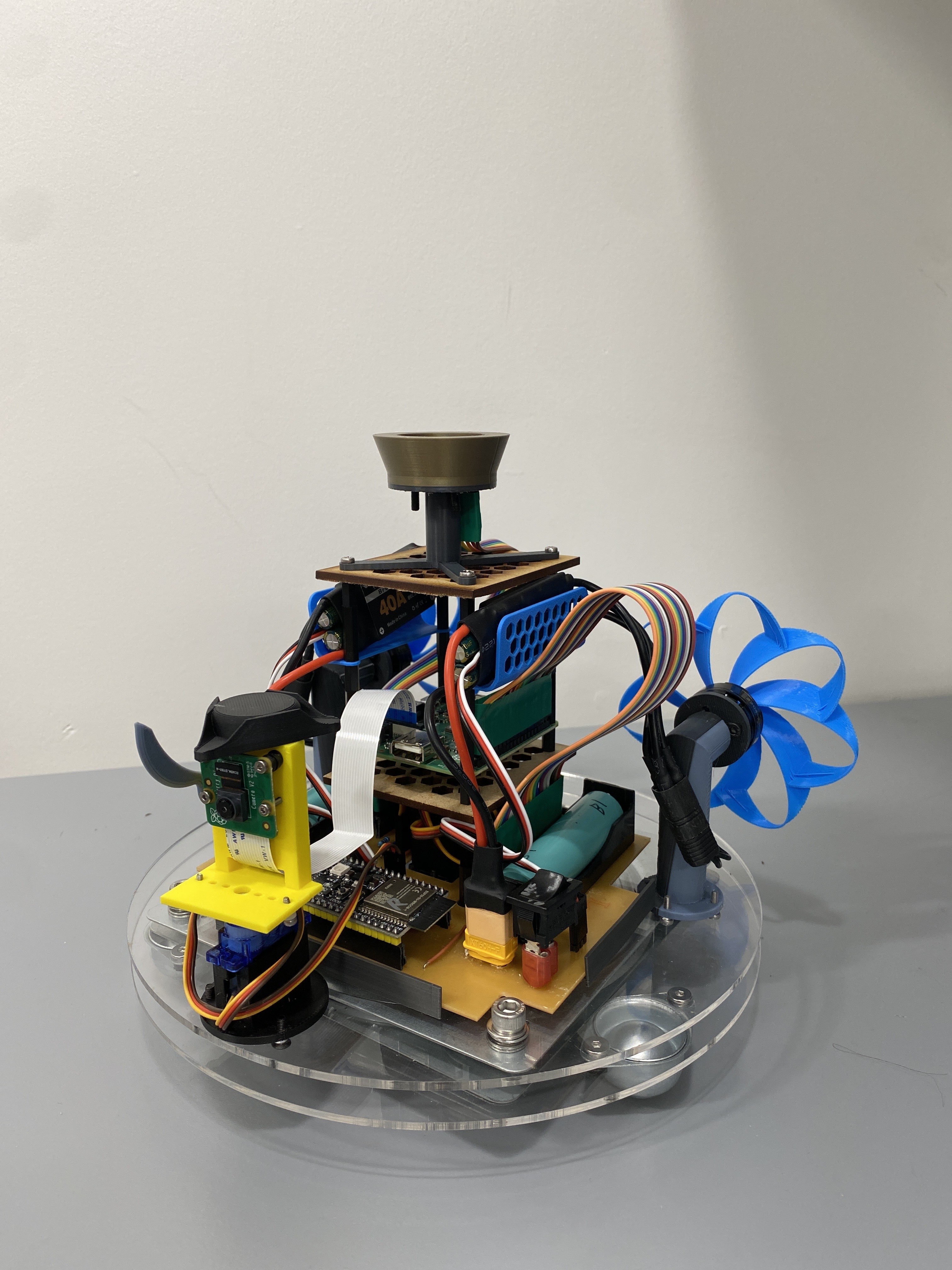
“The Crow’s Nest” was a hovercraft‑inspired robot I designed for ME740 to explore whether monocular vision could be used as the primary sensing method for a maze‑solving micromouse.
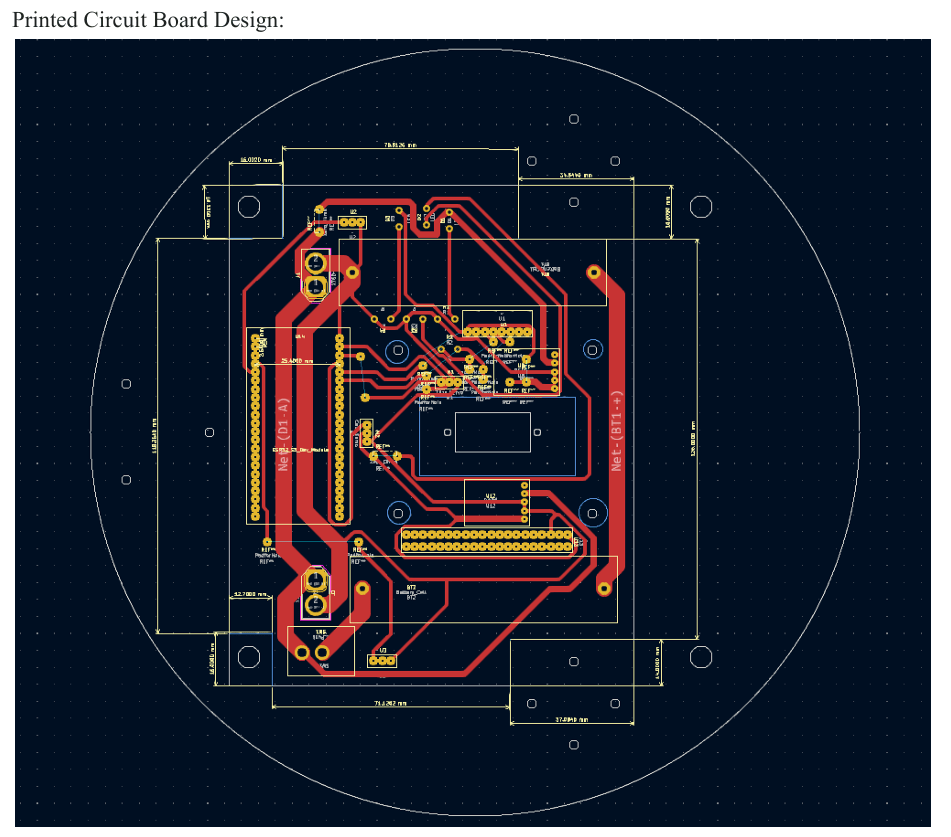
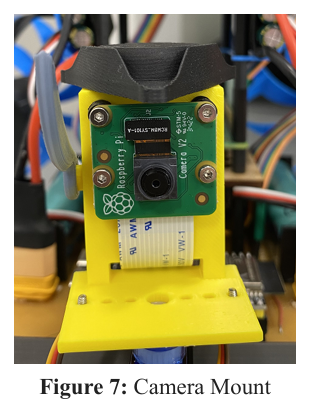
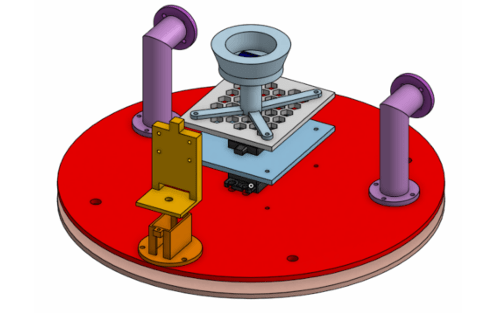
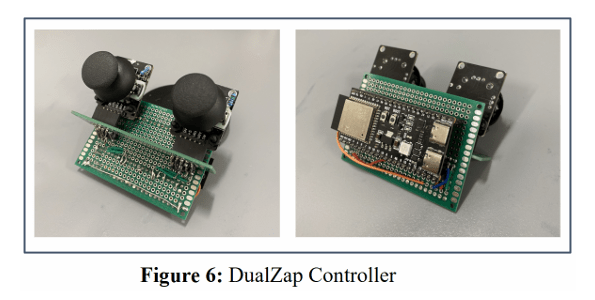
I built the entire system from the ground up, a low‑friction lazy‑susan bearing for the main body, dual propellers for differential thrust, a servo‑mounted Raspberry Pi camera on a 3D‑printed platform, and a custom PCB that I CNC‑milled and hand‑soldered to handle power distribution and signal routing. I also built a custom handheld controller, which I dubbed the “Dual Zap” using an ESP32‑S3 and tuned the propulsion system through iterative mechanical testing.
The robot streamed camera data to a local webpage, and I experimented with MATLAB for depth-sensing using faux-stereo vision, color segmentation, and object following. While the autonomous vision pipeline didn’t fully work due to field‑of‑view limits and vibration, the project taught me a lot about system integration, embedded electronics, modeling and control, and the realities of vision‑based navigation on lightweight platforms. It pushed me to think more critically about mechanical‑sensor coupling, and it sparked a deeper interest in intelligent mechatronics and perception‑driven robotics.