Purdue University
ECE56900: Graduate Robotics
PhD. Hamin Chang
This course built on the principles and fundamentals of Robotics that I had learned at Boston University, diving deeper into the world of rigid body transformations, control of dynamical systems, and ROS2-based approaches.
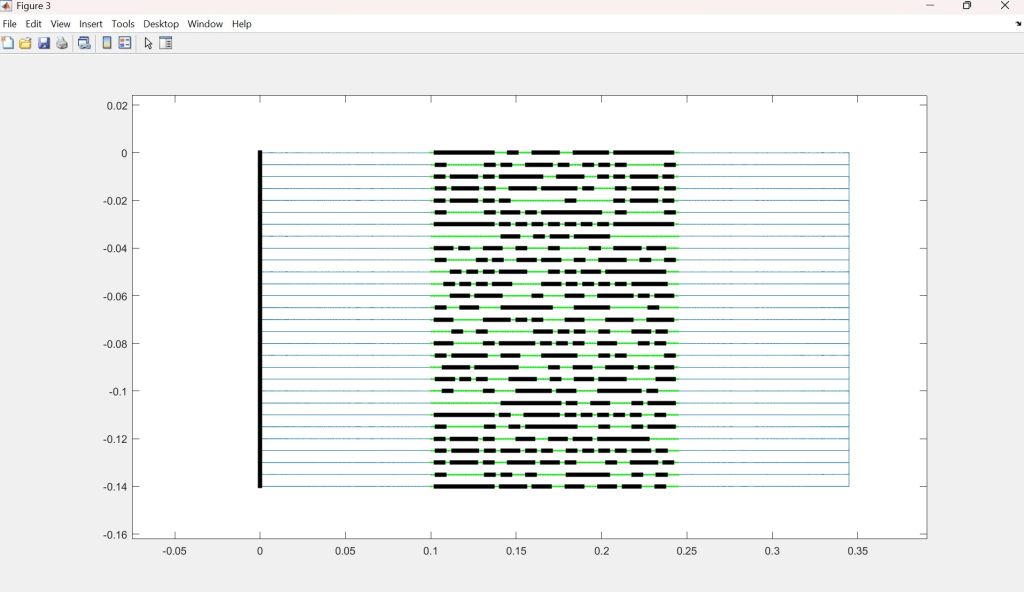
The overarching project involved constructing a simulation of a ur3e robot arm and having it trace preplanned trajectories, then implementing the code onto a real arm and tracing a light drawing using an LED end effector.
I decided to take it one step further and incorporate an LED switching program to control the state of the LED, meaning I could create a QR code with the arm. I ended up successfully programming the digital twin to follow the trajectory and draw the code, but the implementation had some unexpected asynchronous behavior between the ROS motion and LED nodes, resulting in a blurred effect rendering the code unscannable.
Overall, it was a great experience, and I learned plenty about the mathematics behind constructing and controlling a 6 DOF robotic arm.